Salve, amigos modelistas! Hoje vamos dar uma olhada em mais um componente crítico do RC elétrico, a força motriz do modelo: o motor!
O motor elétrico básico
Muito já se falou em outros posts a respeito de motores, ESC para cada tipo de motor, motores indicados para isso e aquilo… mas não se falou especificamente deste componente crucial ao funcionamento do modelo. E é isso que pretendo corrigir agora.
O motor elétrico é uma invenção antiga. O primeiro foi criado pelo húngaro Ányos Jedlik, em 1.828 (pelo menos ele é um dos que leva crédito pela criação). As aplicações vão desde o hobby que amamos até o nosso dia a dia. Liquidificadores, processadores, máquinas de lavar, secadores de cabelo, ventiladores, furadeiras… todos funcionam com o mesmo princípio.

Eletrodomésticos e ferramentas que usam motores elétricos
Para entender a fundo o funcionamento do motor elétrico, temos que voltar às aulas de física do colégio. O motor elétrico nada mais é do que uma espiral formada por um fio condutor elétrico (bobina), com um eixo central ligado a ímãs. Quando uma corrente circula pela espiral, um campo magnético é formado, atraindo ou repelindo os pólos dos ímãs, girando assim o eixo central. A intensidade da corrente determina a velocidade, medida em revoluções por minuto (RPM), e o sentido da corrente determina o sentido dessas revoluções. Esta é a definição mais detalhada de um motor elétrico. A mais curta e sucinta é a seguinte: um motor elétrico é o aparelho que transforma energia elétrica em mecânica. Fácil, não?
Ainda, outra aplicação do motor elétrico é a própria produção de energia. Em uma usina hidrelétrica, um motor elétrico é posicionado de forma que a força das águas impulsionem o eixo com os ímãs, fazendo com que uma corrente elétrica seja formada pela atração/repulsão dos ímãs e transite pelos fios condutores que formam a bobina. Essa corrente é canalizada, e armazenada em “baterias”, para depois ser distribuída.
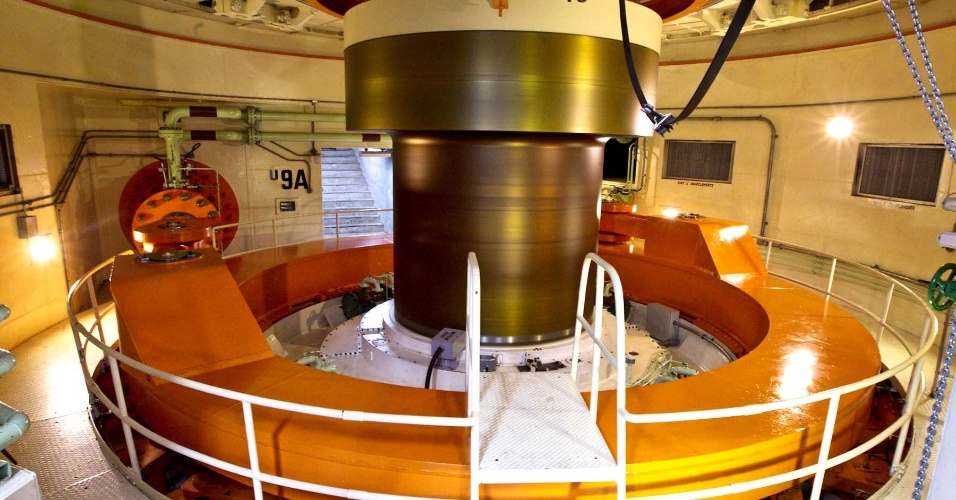
Um “pequeno” gerador, mesmo princípio do motor elétrico
Mas chega de teoria. Vamos ao que interessa. No seu automodelo, você vai usar um motor escovado (brushed) ou um não-escovado (brushless). A diferença, na parte estrutural, é que o motor brushed existente há mais tempo no mundo do modelismo, têm escovas, ou carvões, que realizam o contato entre o rotor propriamente dito, e os ímãs. O atrito provoca desgastes e diminui a vida útil do motor, mas também tem a vantagem de ter um torque maior do que um motor sem escova. Falando nele, o motor brushless usa apenas a indução eletromagnética criada pela corrente que circula pelo motor, o que faz com que a vida útil aumente consideravelmente. A manutenção também é facilitada, pois não é necessário trocar escovas, nem limpar o motor (pelo menos não tão seguido quanto o motor brushed).
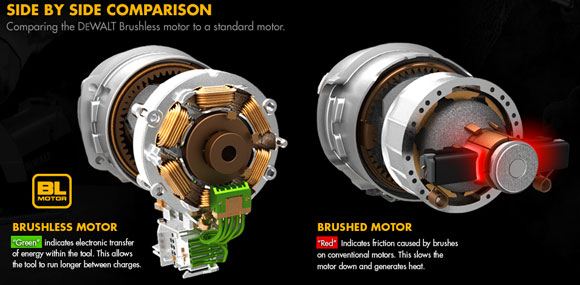
Diferenças entre os motores brushless e brushed
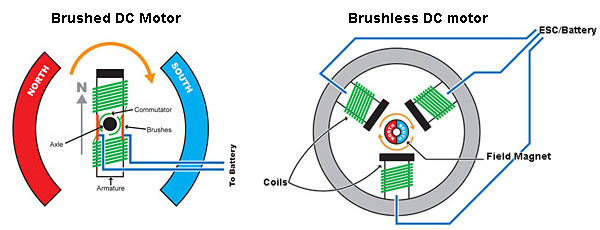
Esquema de cada tipo de motor
Ainda, se a sua opção for por um motor brushless, você pode optar por usar um motor com sensor ou sem sensor. O sensor faz o papel de “suavizador” se é que existe essa palavra. Para usar um motor com o sensor ativo, você deve procurar um ESC que tenha essa opção. Voltando ao motor, a suavização mencionada anteriormente é a quantidade de “cog”. Cog, no inglês britânico, é o dente de uma engrenagem, e o efeito “cogging” no motor sem sensor assemelha-se à falta de um dente em uma engrenagem. Ocorre quando o ímã do rotor passa exatamente no ponto de maior atração, ou de equilíbrio, entre os pólos do campo eletromagnético gerado pela passagem da corrente. Um motor brushless sem sensor vai ter um cog grande (vai “tremer” bastante) quando estiver em baixa rotação, pois o ESC não sabe quando o ímã está passando pelo ponto de equilíbrio do campo eletromagnético. O sensor avisa ao ESC quando isso vai acontecer, e faz com que o mesmo mande a corrente certa para o motor no exato momento em que o ímã passa no ponto de equilíbrio. Isso faz com que o motor, no início da aceleração, não dê essas tremidas, ou gaguejadas, como alguns dizem. Ele vai ter uma aceleração suave e constante desde o início da aceleração.

Motor brushless Speed Passion, com o detalhe do plug do sensor
Nos motores brushed, não ocorre o cog, a não ser que haja algum problema com os componentes internos. Por isso, no caso dos Rock Crawlers, o motor brushed é o preferido, pois normalmente o modelo vai rodar bem devagar para vencer as pedras no percurso. Já quem vai levar o modelo ao limite do desempenho, desenvolvendo altas velocidades, vai optar pelo brushless, tanto por exigir menos manutenção do que o outro, quanto pela velocidade que pode ser atingida.

Traxxas Titan 12T, brushed
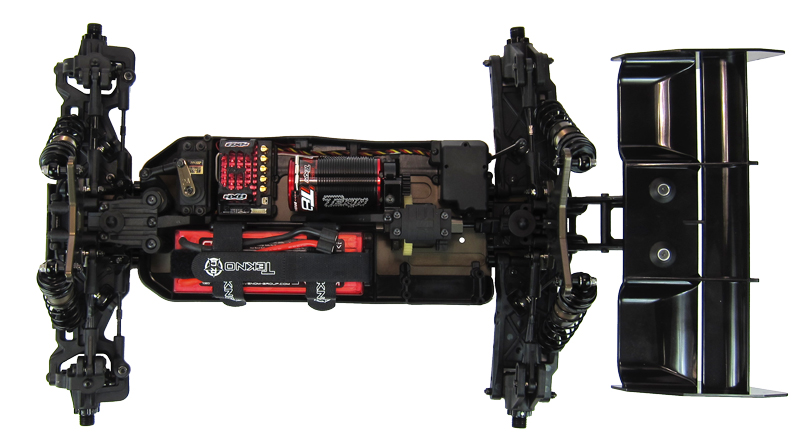
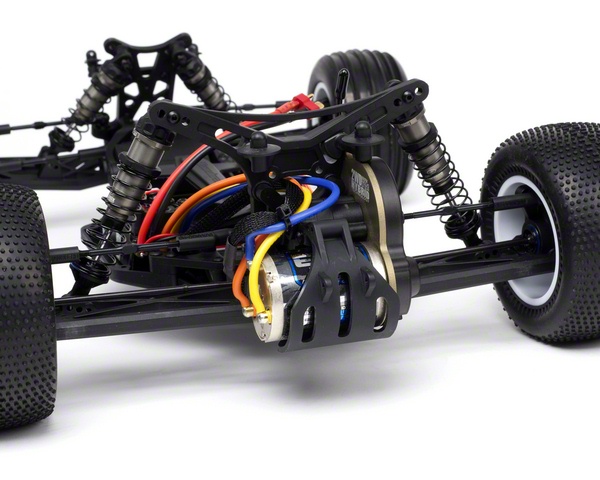
Mais um detalhe que deve ser observado quando se escolhe o motor é o chassi. Cada chassi tem uma limitação de espaço e, normalmente, poucas opções de encaixe e ajuste do motor. Assim, as medidas externas podem ser um fator determinante no momento de escolher o motor. Aliás, um motor enorme não necessariamente quer dizer melhor desempenho, tudo depende do tamanho do modelo (escala) e do que se vai fazer com ele, dentre as várias opções já apresentadas no tópico de estilos de automodelismo.

Traxxas Velineon brushless
E é isso sobre os motores de automodelos RC elétricos. Este tópico, da mesma forma como os que falam sobre ESC’s, servos e receptores, é um complemento do tópico específico de como montar o seu RC elétrico peça por peça. Como eu disse naquele tópico, o ideal para iniciantes é comprar um modelo RTR, mas se você já tem um modelo e quer dar o próximo passo, você definitivamente precisa dessas informações e de outras mais para não dar um pulo errado. O ideal é, depois de ler esses tópicos todos, idealizar um projeto, determinar os componentes que você quer e conversar com outros modelistas, perguntando a opinião deles sobre os seus planos. A experiência sempre é a melhor professora, e um modelista experiente raramente vai lhe dar informações imprecisas ou opiniões que não sejam verdadeiras, de acordo com o que ele já viu.
Então, como sempre, até o próximo artigo, e divirtam-se!